深度模型中的优化——momentum|AdaGrad|RMSProp|Adam
在随机梯度下降中,沿着最速下降方向可以得到最快的下降速度:。其中,是下降步长,也被称为学习率。
在常见的SGD算法中,批量梯度下降(BSGD)的算法如下:(引用《深度学习》(花书)P180)
算法:随机梯度下降(SGD)在第个训练迭代的更新
Require: 学习率
Require: 初始参数
while 停止准则未满足 do
从训练集中采样个样本,其中对应的目标为
计算梯度估计:
应用更新:
end while
PS:花书中把学习率记为 ,把收敛条件记为.
下降步长对梯度下降的影响
一个简单的例子:给定目标函数 ,初始点,其梯度(导数)为,给定步长,根据上文的更新公式计算,发现;继续进行下降更新,发现;如此反复,搜寻结果会反复在[-1, 1]之间横跳,且目标函数的值并不下降。
显然,随着训练的推进,我们应当逐渐减小下降步长。保证SGD收敛的一个充分条件是:
对于学习率/下降步长的选择设置,主要有以下两种情况:
- 设置过大,会出现剧烈的震荡,甚至完全不收敛;
- 设置过小,学习过程非常缓慢,且容易卡在一个局部最优值。
对于BSGD,一个比较有意思的现象是当训练的批次样本较多时,他更容易收敛。在本文中我们只在一维上进行搜索,因此很容易出现不收敛的现象。
学习率优化算法的衡量标准
引入额外误差(excess error) ,即当前代价函数超出全局最小值的量。在凸问题中,SGD在步迭代之后的额外误差量级为,强凸情况下是。
SGD学习率的提升方案
我们以为例子,先看看它的图像和梯度:(约定本文中所有的图横轴为迭代次数、纵轴为代价)
ximport numpy as npimport matplotlib.pyplot as pltdef func(x): return np.sin(x) + np.power(x, 2)def grad(x): return np.cos(x) + 2 * xxes = np.arange(-5, 5, 0.1)plt.plot(xes, func(xes), label="f(x)=sin(x)+x^2")plt.plot(xes, [0 for i in xes], '--')plt.plot(xes, grad(xes), label="f'(x)=cos(x)+2*x")plt.legend()plt.show()

线性衰减学习率
根据SGD的收敛充分条件,我们不难给定一个线性衰减的学习率,设定经过次迭代之后,令保持常数。既有:
通常,设定为的左右(令),即:;但的设定依旧容易带来函数收敛过程剧烈震荡或收敛过慢的问题,因此有更多优秀的自自适学习率算法被提出,在深度学习框架中有时把这些算法称为优化器。
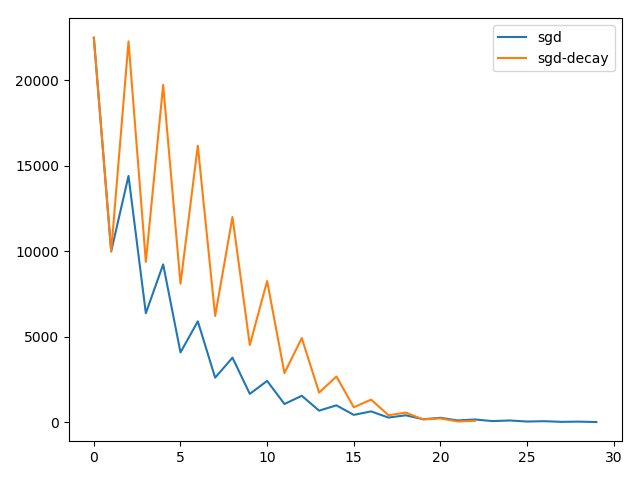
利用进行定步长SDG和衰减学习率的下降:
xxxxxxxxxxepsilon = 1e-1 # 停止准则lambda0 = 0.1 # 学习率(定长模式下如果给定较大的学习率可能不收敛)x0, x1 = -150, 100costs = []while abs(x1 - x0) >= epsilon: costs.append(func(x0)) temp = x1 x1 = x0 - lambda0 * grad(x0) x0 = tempprint("x* = ", x0)plt.plot(range(min(len(costs), 30)), costs[0:30], label="sgd")epsilon = 1e-1 # 停止准则tau, k = 100, 1lambda0 = 1 # 学习率(可以直接给定一个较大的学习率也能保证收敛)lambda_tau = lambda0 / taux0, x1 = -150, 100costs, l0 = [], lambda0while abs(x1 - x0) >= epsilon: costs.append(func(x0)) temp = x1 x1 = x0 - l0 * grad(x0) x0 = temp alpha = min(k/tau, 1) l0 = (1-alpha)*lambda0 + alpha*lambda_tau # 进行衰减 k += 1print("x* = ", x0)plt.plot(range(min(len(costs), 30)), costs[0:30], label="sgd-decay")plt.legend()plt.show()其函数图像如下(可以明显看到衰减学习率方案收敛得更快,但由于给定了大学习率,因此震荡更剧烈):
动量下降(momentum)
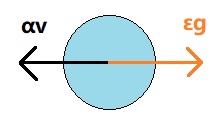
动量下降中引入了物理中惯性的概念,就像一个小球从山坡上滚下时,由于惯性的原因会直接冲过一些小坑,然后滚到山脚。在动量下降方案中,各超参数的更新规则如下:
算法:使用了动量下降方案的SGD
Require: 学习率、动量参数
Require: 初始参数、初始速度
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
计算梯度估计:
计算速度更新:
应用更新:
end while
直观上理解,如果梯度的方向始终一致,那么SGD就会在这个方向上不停加速,将原步长每次放大为上一轮的倍。否则,会产生一个相反的惩罚:
这样的好处就在于我们能够在一定情况下冲破局部最优点的陷阱,同时,面对较高的壁垒时比定步长SGD有更好的收敛性质。
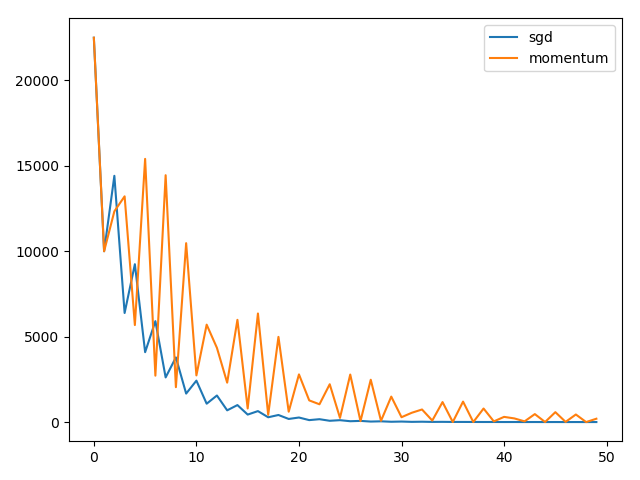
在实践中,的取值一般为。利用python实现:
xxxxxxxxxxepsilon = 1e-1 # 停止准则lambda0 = 0.5 # 给定与sgd相同的学习率alpha = 0.5v = 1 / (1-alpha)x0, x1 = -150, 100costs = []while abs(x1 - x0) >= epsilon: costs.append(func(x0)) temp = x1 v = alpha * v - lambda0 * grad(x0) x1 = x0 + v x0 = tempprint("x* = ", x0)plt.plot(range(min(len(costs), 50)), costs[0:50], label="momentum")plt.legend()plt.show()对比图像其实很难看到momentum在收敛性上相比于定步长SGD并没有什么太大的优点,甚至给定较大步长时也容易不收敛:
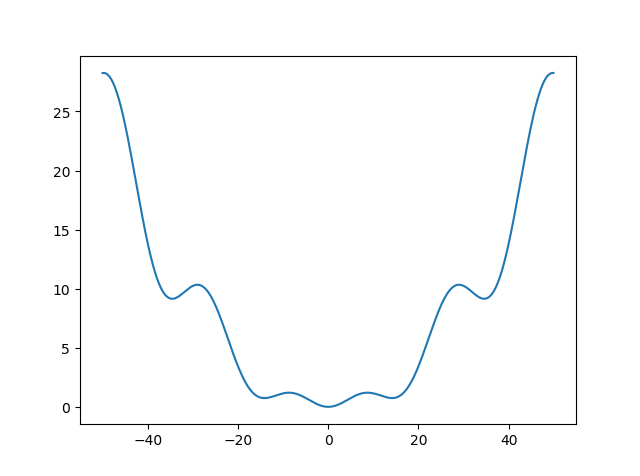
但是,如果我们稍微换一个损失函数/目标函数,效果就会非常明显:(接下来的实验都将继续采用这个函数)
xxxxxxxxxxdef func(x): return 0.1 * x * np.sin(0.3 * x) + 0.01 * x ** 2def grad(x): return 0.01 * np.cos(0.3 * x) * x + 0.2 * np.sin(0.3 * x) + 0.02 * x该新目标函数的图像如下,可以看到其有多个局部最优点:
在区间中测量定步长SGD和momentum方案的性能,给定、二者一致的学习率:
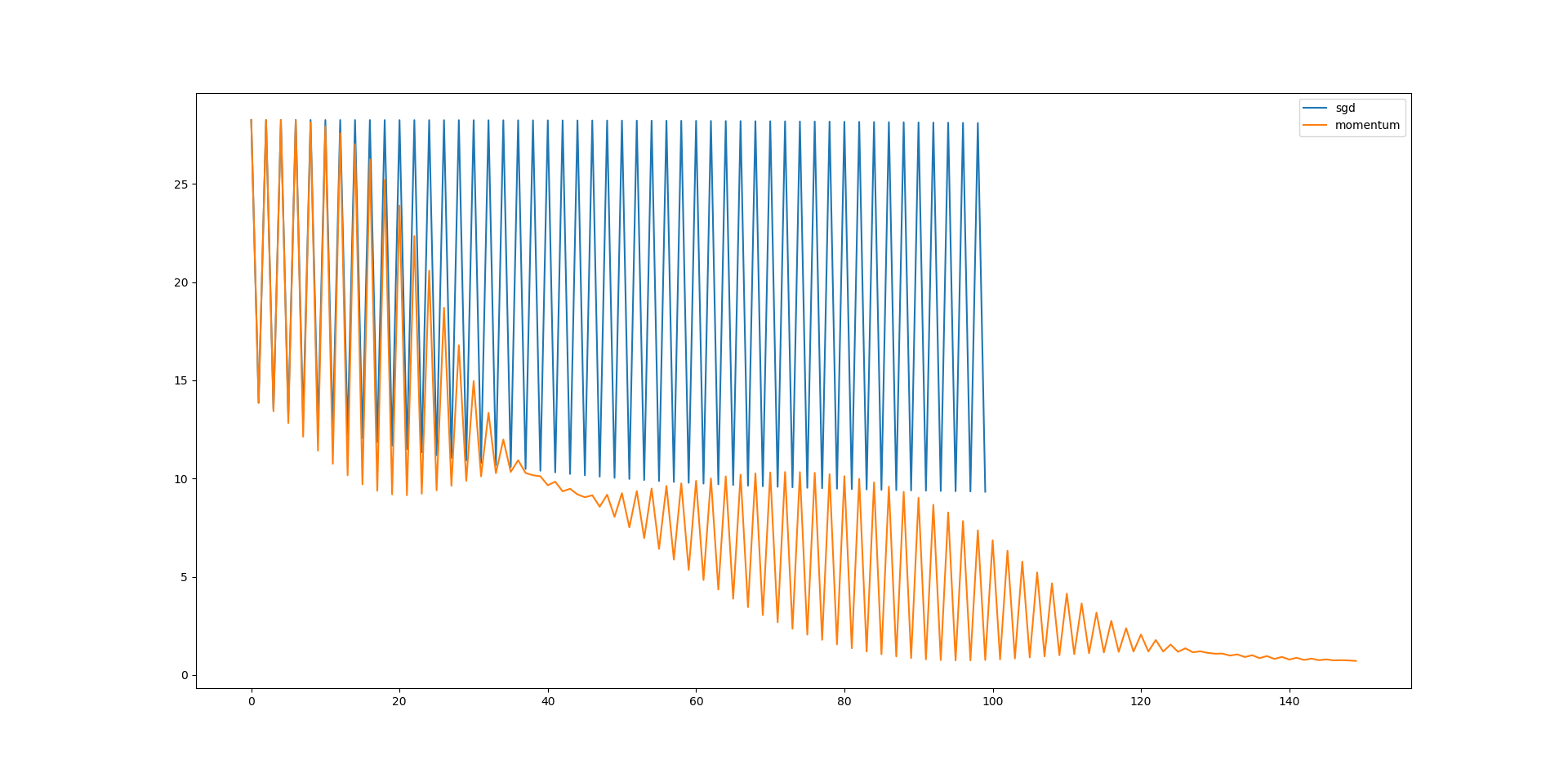
可以看到——在未经过细致调参的情况下,momentum方案冲破了第一个局部最优值继续下降;但是相对的,定步长SGD就没那么好运了(同样的,学习率线性衰减的SGD也会困于局部最优解)。所以,当我们提到SGD方案时,实际上往往用的是momentum及其改进方案,例如Keras框架就是这么做的。
Nesterov动量下降
为了改进momentum方案的额外误差收敛率,一个比较著名的变种是Nesterov动量下降:
算法:使用了Nesterov动量下降方案的SGD(花书P184)
Require: 学习率、动量参数
Require: 初始参数、初始速度
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
应用临时更新:
计算梯度估计:
计算速度更新:
应用更新:
end while
它将额外误差收敛率从改进到了;但是在SGD的情况下,它并没有改进收敛率。
直观上理解,Nesterov方案比momentum方案多跨了一步,即,考虑得更多的是物理上的微分概念;在SGD的应用上,个人感觉并没有太大的性能改进表现,只在全批量下降时有着比较优秀的收敛性能。
AdaGrad
我们注意到,动量下降虽然在一定程度上优化了线性衰减的学习率和定步长SGD方案的弱点,但同时又引入了另一个超参数;而在实践中,超参数是一个非常难以确定的值。
所以我们希望学习率能在训练过程中进行自适应,即自我进行调整,以提升收敛率和降低收敛额外误差同时又不至于引入更多的超参数,减小调参的工作量。之前曾提过“成功失败法”,即Delta-bar-delta算法的变种,但缺点在于这类算法只有面对全批量下降时才比较有效。
而此处要介绍的AdaGrad算法,能够独立地适应所有模型参数的学习率,缩放每个参数反比于其所有梯度历史平方值总和的平方根。这么说可能过于拗口,我们直接看算法:
算法:AdaGrad算法(花书P188)
Require: 全局学习率
Require: 初始参数
Require: 小常数(防止进行除法时的值溢出)
初始化累积变量
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
计算梯度估计:
累积平方梯度:
计算参数更新:
应用更新:
end while
花书中对AdaGrad的分析较少,但作为自适应学习率算法的入门算法,我觉得有必要进行一些分析:
- 和常见的优化算法相比,AdaGrad的策略也是采取先快后慢的策略:随着算法不断迭代,会越来越大,整体的学习率越来越小。
- 在凸优化问题中,由于函数总能收敛到一个最小值且AdaGrad对梯度悬崖有着很强的抑制能力,因此表现得相当不错,较少出现不收敛的情况。
- 较为直观地说,AdaGrad应用于凸优化问题时,能够给定一个巨大的学习率参数的同时保证收敛,利于加快解决优化问题时的搜寻速度。但其面对梯度壁垒时应对能力较弱,有可能被困于某个具备最优解。
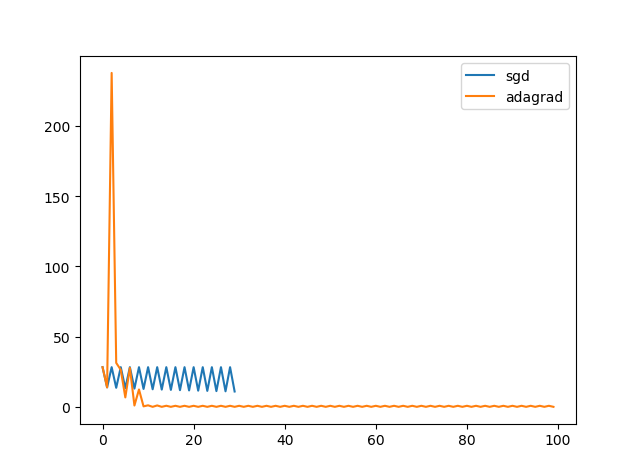
xxxxxxxxxxepsilon = 1e-1 # 停止准则lambda0 = 100 # 学习率,AdaGrad往往需要一个极大的初始学习率r = 0x0, x1 = -50, -40costs = []while abs(x1 - x0) >= epsilon: costs.append(func(x0)) g = grad(x0) temp = x1 r = r + g ** 2 x1 = x0 - lambda0 / np.sqrt(1e-6 + r) * g x0 = tempprint("x* = ", x0)plt.plot(range(min(len(costs), 50)), costs[0:50] label="adagrad")得益于AdaGrad对梯度爆炸有着很好的抑制作用,所以实际上你可以给定一个很大的初始学习率,它在自我迭代的过程中也总能保证收敛。
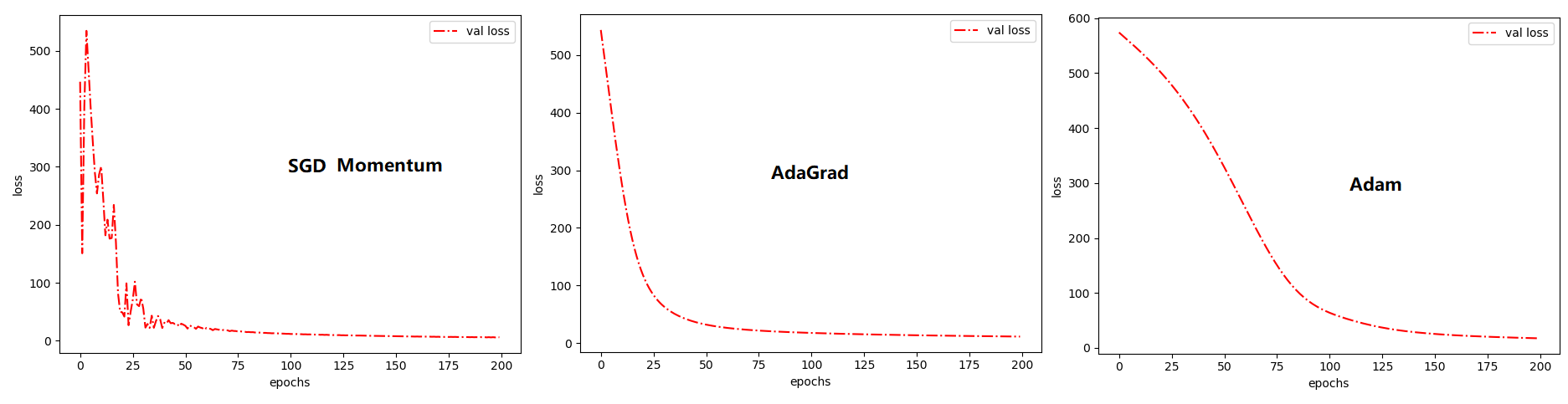
值得一说的是,AdaGrad在深度学习模型上表现得不错,比如采用64x64x1的全连接神经网络在波士顿房价回归问题上的表现如下:
RMSProp
在上面的图像中,AdaGrad在非凸情况下表现得并不好,收敛时震荡还是比较剧烈的。同时,如果你把上文中AdaGrad的初始学习率调小,你会发现AdaGrad会跟SGD一样困于某个局部最优值。造成AdaGrad面对梯度壁垒无能为力的可能性有很多,但最大的可能是搜索在到达一个局部洼地时学习率就收缩得太小了,因此导致搜寻的脚步深陷泥沼。
因此RMSProp改变梯度累积值为指数加权的移动平均值——抛弃过于遥远的历史,使其能够保证一定的跃出洼地泥沼的能力;但相对的,也会削弱其收敛率,在样本量较小时甚至完全不收敛。简单来说,就是把 改为 ,其中为衰减速率。
直观上理解,RSMProp的设计思路是这样的:梯度波动比较大的函数,它们的方差一定是非常大的,因此直接用梯度除以其二阶矩的开方,从而抑制了搜索时的摆动幅度。
算法:RMSProp算法(花书P188)
Require: 全局学习率、衰减速率
Require: 初始参数
Require: 小常数(防止进行除法时的值溢出)
初始化累积变量
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
计算梯度估计:
累积平方梯度:
计算参数更新:
应用更新:
end while
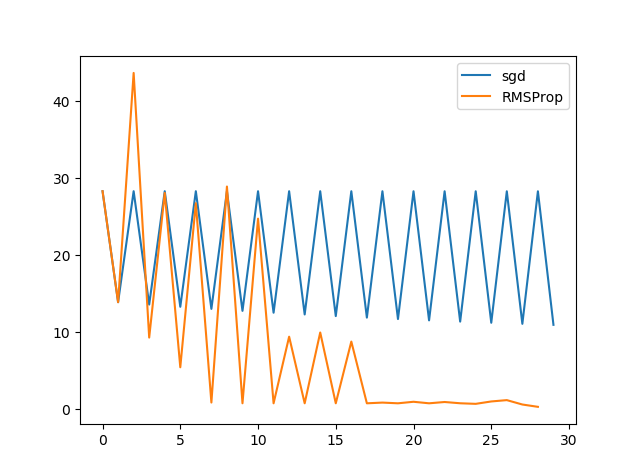
xxxxxxxxxxepsilon = 1e-1 # 停止准则lambda0 = 10 # 学习率,给定一个相比于AdaGrad的学习率,其也能快速收敛和突破梯度壁垒r, rho = 0, 0.5x0, x1 = -50, -40costs = []while len(costs) < 1000 and abs(x1 - x0) >= epsilon: costs.append(func(x0)) g = grad(x0) temp = x1 r = rho * r + (1-rho)*g ** 2 x1 = x0 - lambda0 / np.sqrt(1e-6 + r) * g x0 = tempprint("x* = ", x0)plt.plot(range(min(len(costs), 100)), costs[0:100], label="RMSProp")plt.legend()plt.show()运行结果如下:
有时候,还会为其加上Nesterov动量,使得其在某些问题上具有更好的性质:
算法:使用Nesterov动量的RMSProp算法(花书P189)
Require: 全局学习率、衰减速率、动量系数
Require: 初始参数、初始速度$v
Require: 小常数(防止进行除法时的值溢出)
初始化累积变量
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
计算临时更新:
计算梯度估计:
累积平方梯度:
计算参数更新:
应用更新:
end while
我平常在应用时,并没有觉得二者有什么特别大的差别,因此老老实实用RMSProp就行了,还能少计算一些参数和引入超参数。可能对于一些较为疯狂的调参侠而言加了Nesterov,给了他们更多的微调空间。
Adam
Adam的词源来自adaptive moments,显然这又是一种动量方案和RMSProp的变种算法。从个人经验上来看,Adam往往更加地Robust,算是我用得比较多的一种优化方案。
算法:Adam算法(花书P189)
Require: 全局学习率
Require: 矩估计的指数衰减速率(建议默认0.9和0.9999)
Require: 初始参数
Require: 小常数(防止进行除法时的值溢出)
初始化时间序列、一阶和二阶矩变量
while 没有达到停止准则 do
从训练集中采样个样本,其中对应的目标为
计算梯度估计:
更新一阶矩估计:
更新二阶矩估计:
修正一阶矩偏差:
修正二阶矩偏差:
计算参数更新:
应用更新:
end while
观察这个算法,一阶矩和二阶矩可以简单理解成均值和方差,由于二者初始值都是,因此需要在刚开始时进行放大修正防止其向偏置。最后计算参数更新时,实际上用了一阶矩和二阶矩进行了估算。
矩估计可以看我的另外一篇文章:数理知识:参数估计——点估计、区间估计及置信区间
在吴恩达的公开课中,他给出他对Adam的理解,他认为Adam是momentum和RMSProp的一种结合:若把一个优化问题看成超空间上的谷地,搜索过程会在某个方向上来回摇摆,我们把这个方向记为纵轴;相反的,直达谷底的方向即为横轴。我们要做的就是抑制纵轴上的移动距离、加大在横轴上的移动距离。Adam和momentum对梯度的均值进行估计,使得纵轴上的摆动幅度减小;而对二阶矩即方差的抑制,可以进一步减小摇摆,相对的就是加大了横向搜索距离。
常用方案的对比总结
这里再快速回顾一下以上各种算法的特点。
| 算法名 | 引入新的超参数 | 容易困于洼地 | 初始学习率/收敛率 | Cheat Sheet |
|---|---|---|---|---|
| 线性衰减学习率 | 是 | 可以较大 | ||
| momentum | 否 | 较小 | ||
| Nesterov | 否 | 较小 | ||
| AdaGrad | / | 是 | 大 | |
| RMSProp | 否 | 较大 | ||
| Adam | 否 | 大 |